动作(action)映射介绍
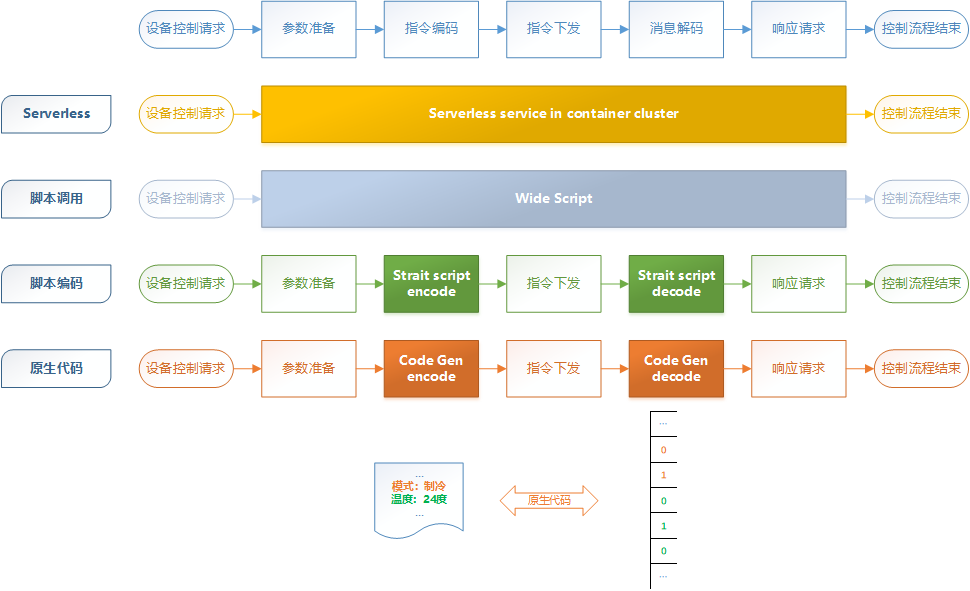
物模型1.0支持四种动作映射方式,分别是:Serverless、脚本调用、脚本编码和原生代码。
| 映射方式 | 说明 |
|---|---|
| Serverless | 品类服通过无服务的形式部署至容器集群,通过品类服务完成完整的动作执行链路 |
| 脚本调用 | 通过groovy脚本完成整个动作的执行链路 |
| 脚本编码 | 通过groovy脚本分别完成完整的设备下发指令和上报数据编解码 |
| 原生代码 | 按位实现设备报文和属性之间的映射 |
操作参数转换的作用和配置
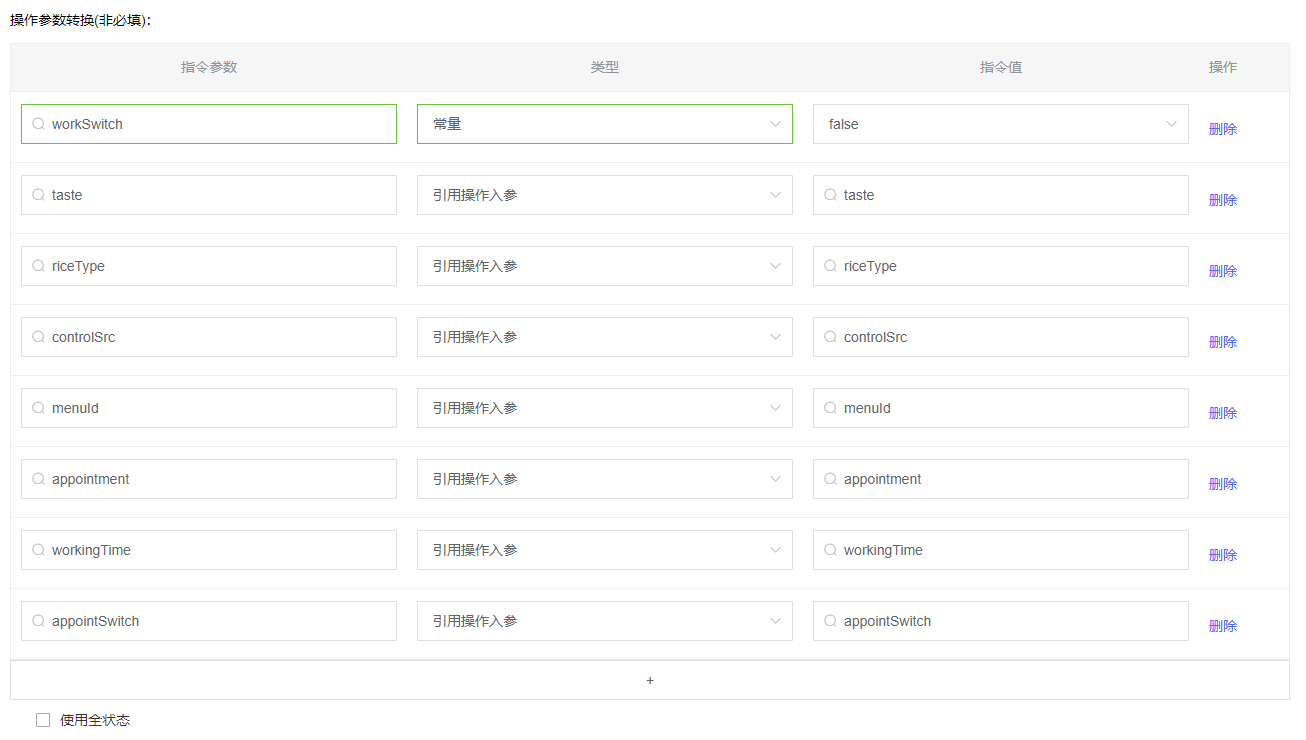
操作参数转换:用于将调用者输入的指令值转换为设备控制需要的指令参数,该选项是非必填项,某些不需要参数的动作无需配置操作参数转换。
引用操作入参:将控制请求传入的指令值作为设备控制指令参数的引用,适用于可变参数的场景。
常量:直接赋予指令参数一个常量,适用于固定参数的场景。
例:某个设备动作是给空调设置定时关机,定时状态一定会是开启的,可以设置为常量;定时时间则是不固定的,需要通过引用操作入参转化为指令参数。
- 使用全状态:在初始化品类物模型1.0的时候,会自动生成两个特殊的全状态操作
__fullControl__和__fullQuery__,分别代表着全状态控制和全状态查询。
配置操作映射时如果选择“使用全状态”,则会调用__fullControl__进行全状态控制(如果该操作配置的参数相对该品类设备的全状态有缺失,会先调用一次__fullQuery__进行全状态查询以补全缺失的属性)